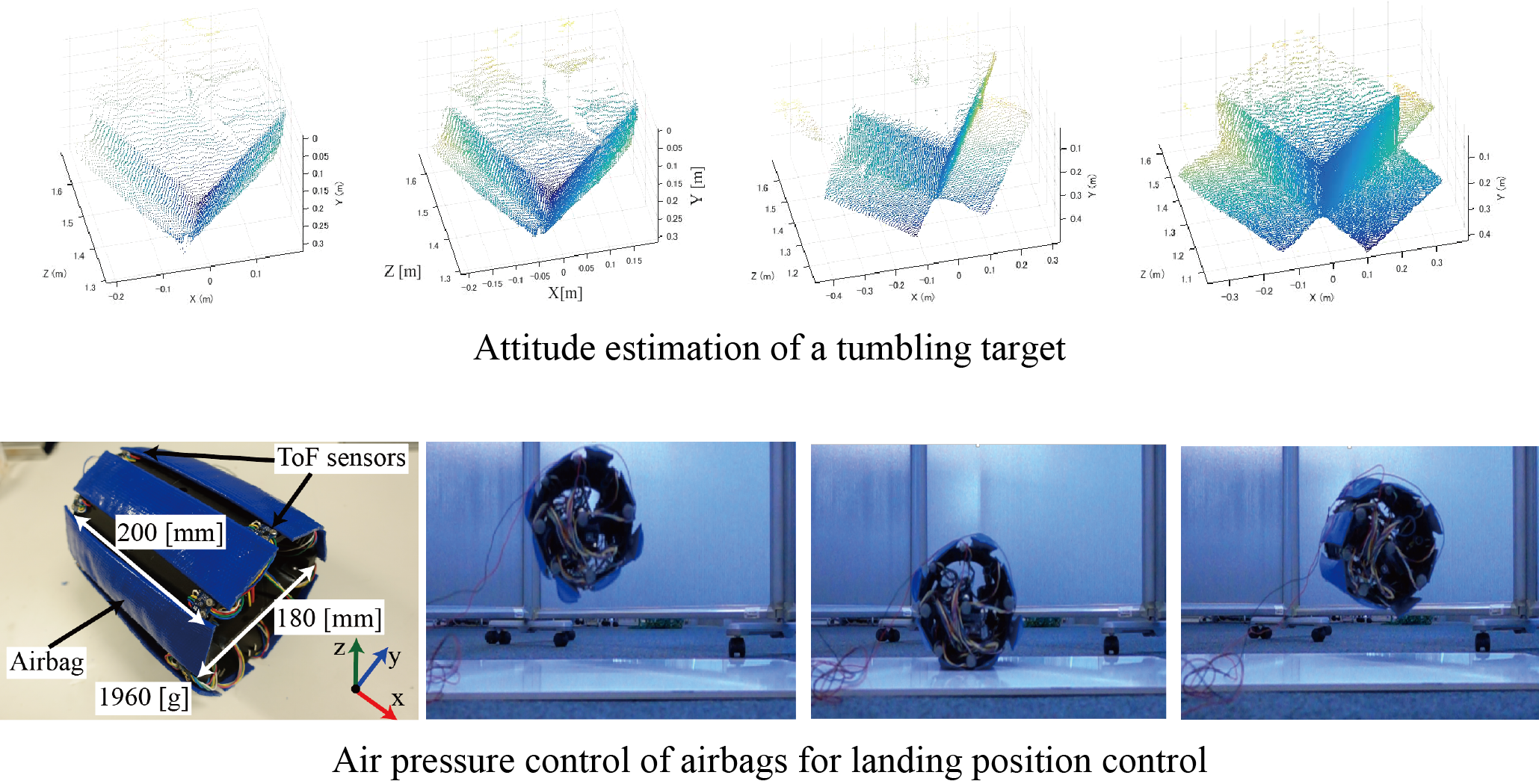
Space Robot
民間企業の宇宙ビジネスへの参画が世界的に活発化しています。 本研究では、有人作業などをサポートするロボットやエアバック圧力制御等の新しいアイデアに基づく探査システムなど、宇宙環境という特殊な極限環境にて活躍するためのロボットシステムを考案し、基礎提案や検証を行っています。
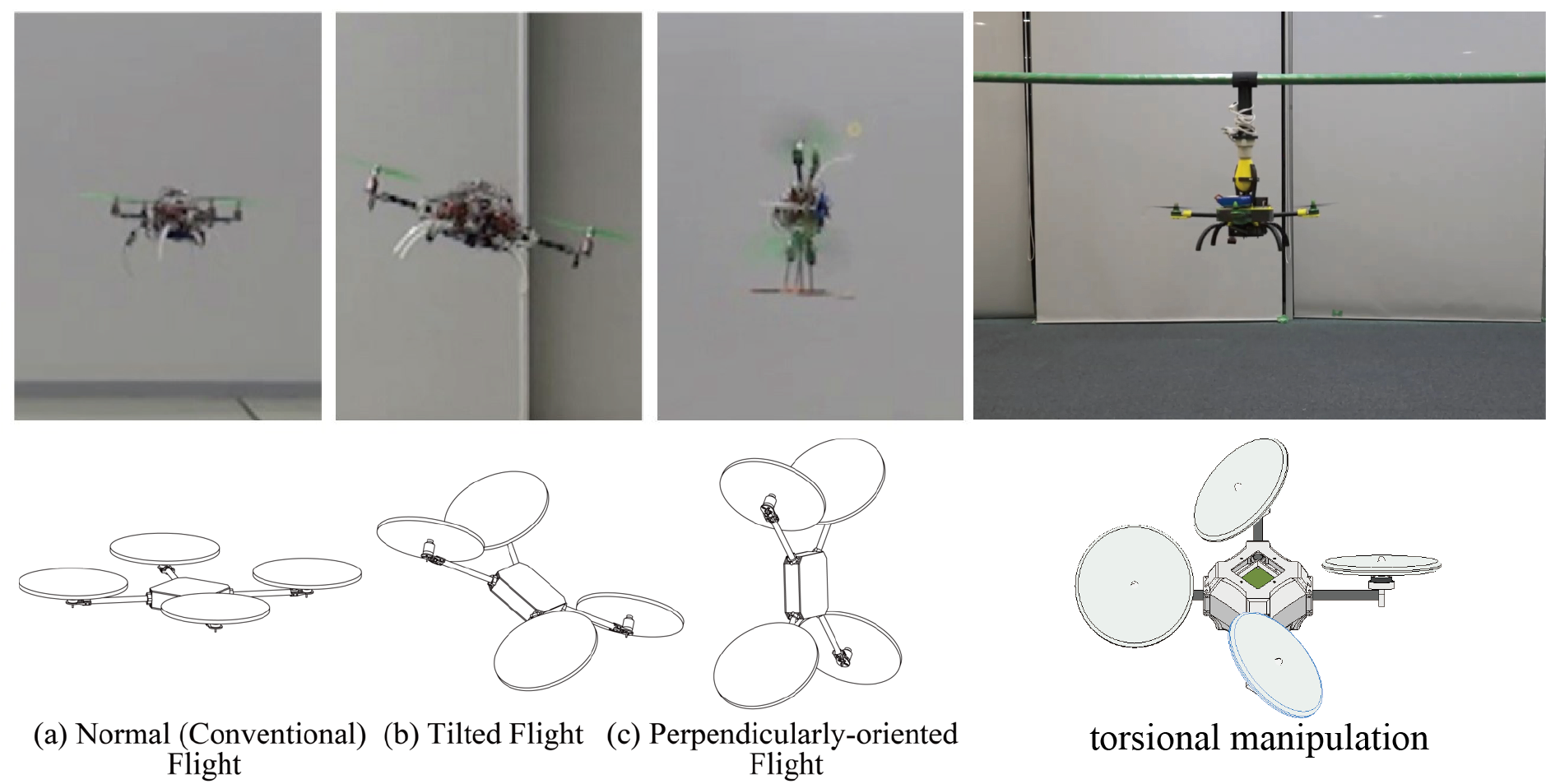
Unmanned Aerial Vehicle
小型マルチコプタに代表される無人航空ロボット(UAV)は、人が容易に到達することが困難な高度での空中作業や遠隔地での作業を担うことがが期待されています。本研究では、推力方向を変化させることで、任意の姿勢で飛行が可能なUAVや可変ピッチプロペラ搭載型UAV等、従来機にはない機動性を有するUAVの設計・開発を行っています。これまでにない機体を開発していることから、空気力学的視点を取り入れた飛行性能の検証、また、それらの機体の特徴を活かした作業の実現や実環境での自律飛行に関する研究を行っています。
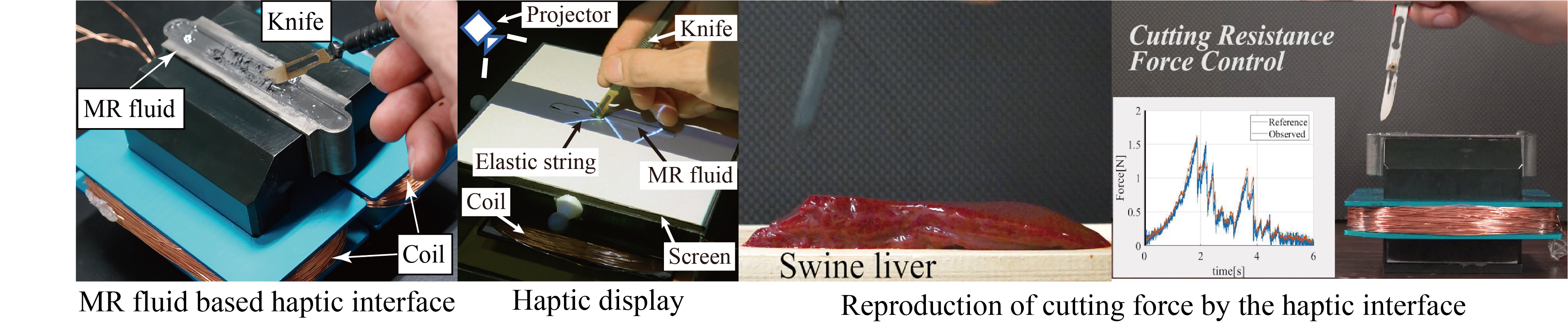
Surgical Simulator
医療現場における技量向上のために、バーチャルリアリティ技術を応用した手術シミュレータの導入が期待されています。手術シミュレータとは、計算機内に構築された仮想人体組織に対して手術を行った際の反力を、ハプティックインタフェース(力覚提示装置)を用いて術者に提示することで、より現実感の高い手術感覚を体験することが可能なシミュレータのことです。本研究では、機能性流体の一つであるMR(Magnetorheological)流体を用い、機械的な拘束を伴わない遭遇型ハプティックインターフェースを用いた手術シミュレータの研究を行っています。印加磁場の強度でみかけの粘性が制御可能なMR 流体を仮想人体組織とし、それに対して直接、切断等の操作を行うことで、より現実に近い手術シミュレータの開発を目指しています。 また、それに伴い、手術シミュレータに適したMR流体の検討・開発や磁場印加時のMR流体そのものの微視的挙動を力学的に解明することで機能性流体の応用分野の開拓を目指しています。
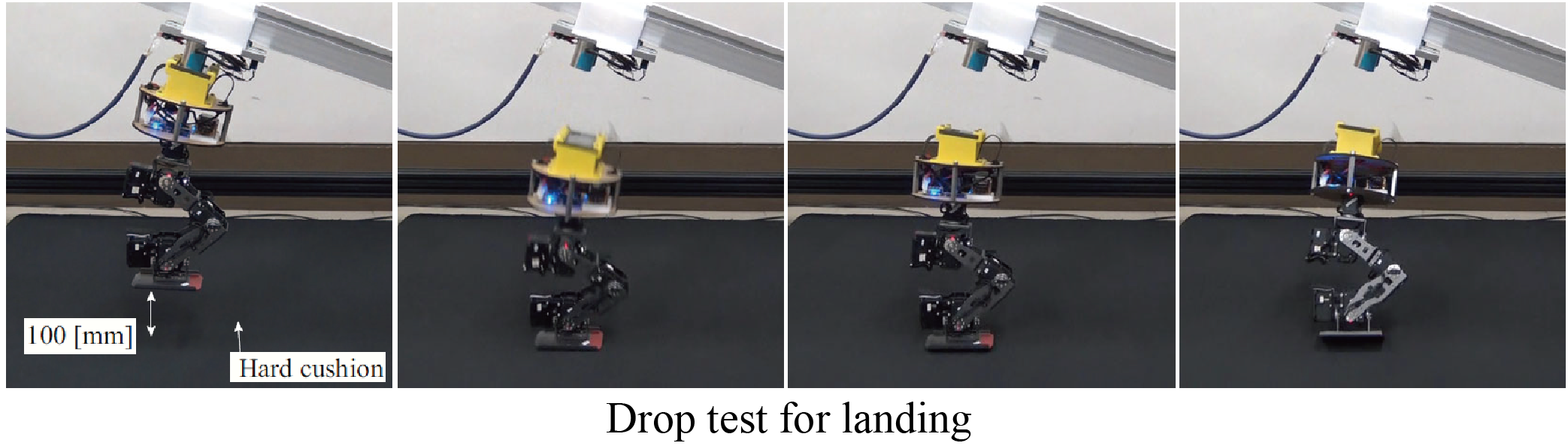
Humanoid Robot
人型ロボットであるヒューマノイドロボットは、従来の産業用ロボットアームと異なり、地面に固定されることなく、脚の歩行動作により移動します。また、人間のように多自由度の両腕を有するため、人間のような作業を行うことができます。そのため、人が生活している環境下において人の代わりに様々な作業を担うことが期待されています。しかしながら、地面に固定されておらず、かつ、数多くの関節を有するが故に、その制御は難しく外部から受ける力によって転倒してしまう危険性もあります。また、高所からの着地といった極限条件ではロボットそのものが破損してしまう危険があります。そこで、本研究ではヒューマノイドが有する自由度を有効に使いながら、受身動作などの全身協調動作によって、巧みに衝撃力を緩和する方法について研究を行っています。